Our Activities
Innovation in action: Projects, Events, and Workshops.

Visit to Liceo Los Delfines
Robotics Demonstration

F1TENTH RoboRacer
1st and 2nd Place - Autonomous Navigation

ESPOL Novatada
Welcome to New Students
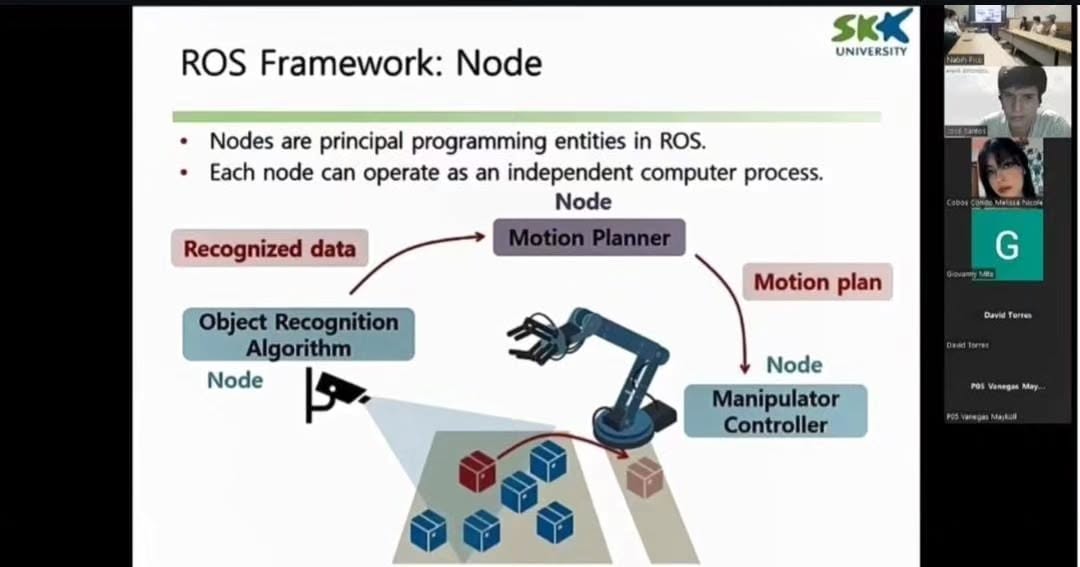
Basic ROS Tools
AIROS Development Standard
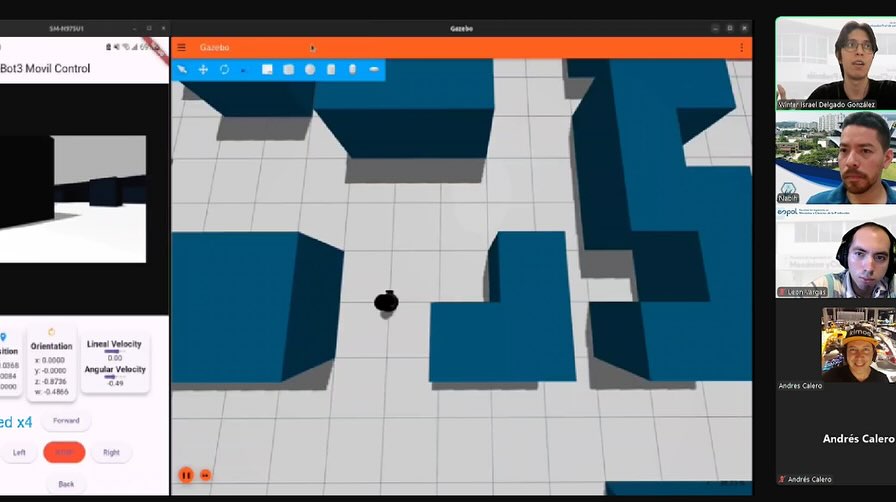
Monitoring and Teleoperation
Autonomous Navigation Failures (ROS)
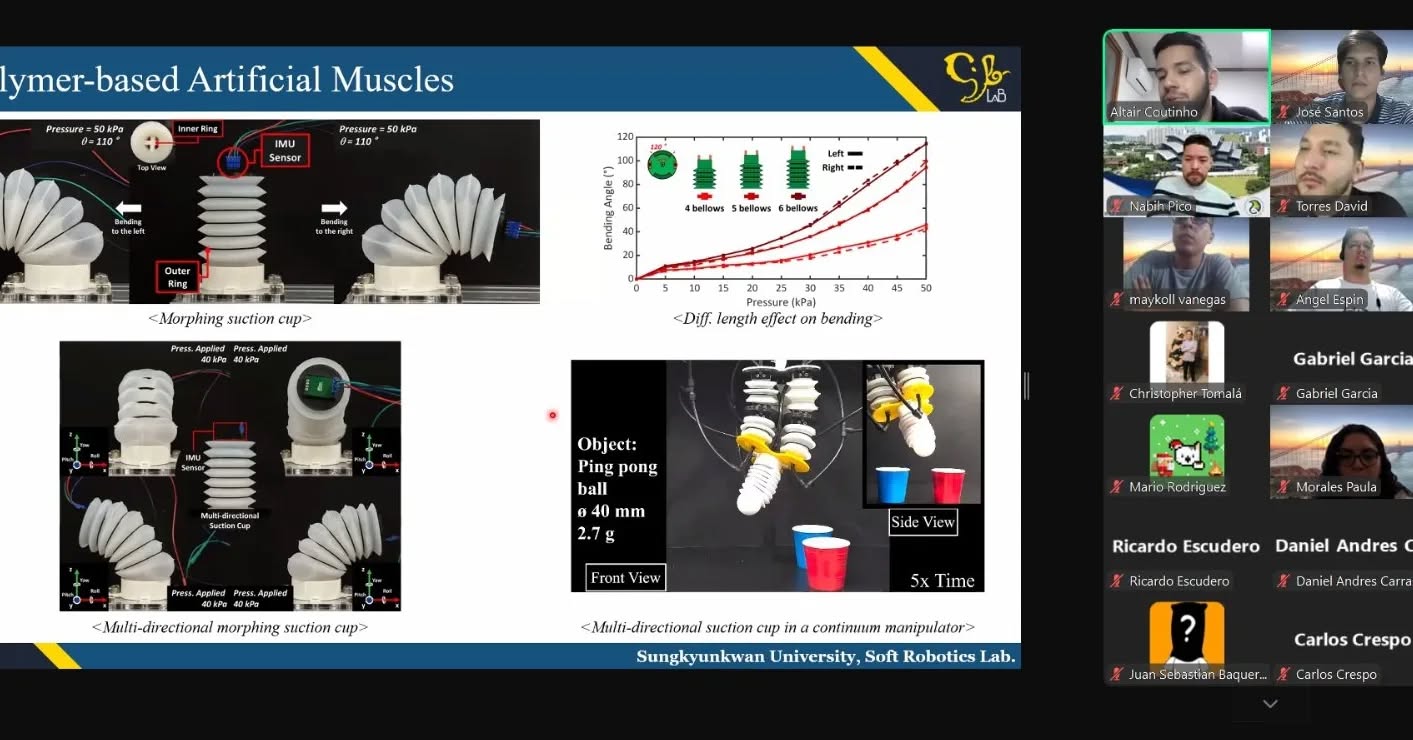
Artificial Muscles
Actuators in Robotics (Hyper-VAM)

Visit to COPOL
Outreach and Project Showcase